|
株式会社人機一体(本社:滋賀県草津市、代表取締役:金岡博士、以下「人機一体社」)は、この度、独自の先端ロボット工学技術に基づく汎用ロボットプラットフォーム構築に向け、新たな開発フェーズに移行したことをお知らせいたします。 |
|
本プロジェクトでは、既製品の協働ロボットへ人機一体社独自の力制御技術・パワー増幅バイラテラル制御技術等を適用し、今、苦役に悩む現場への早期の社会実装を実現します。 |
|
|
|
|
|
|
|
背景:「技術の深化」から「技術の展開」へ |
|
|
|
■ PoC 開発による「技術の深化」 |
|
|
|
人機一体社は、先端ロボット工学技術に基づく知的財産活用サービス「人機プラットフォーム」を通じ、実用化企業(ユーザ)や製品化企業(メーカ)などの参画企業と共同で、数々の革新的な PoC 試作機を創出してきました。「零式人機」「零二式人機」「人機スチュワートプラットフォーム」「人機カート」などに代表されるこれまでの開発は、ゼロベースの設計によって、従来の産業用ロボットや油圧重機では実現が難しい「強大なパワー」を「緻密な力制御」により直感的に操り、自動化が難しいとされる現場作業の機械化を可能としました。これらの実証を通じて、人機一体社は唯一無二の力学ベースのロボット制御工学技術の知見を蓄積し、技術を深化させてきました。 |
|
|
|
|
|
|
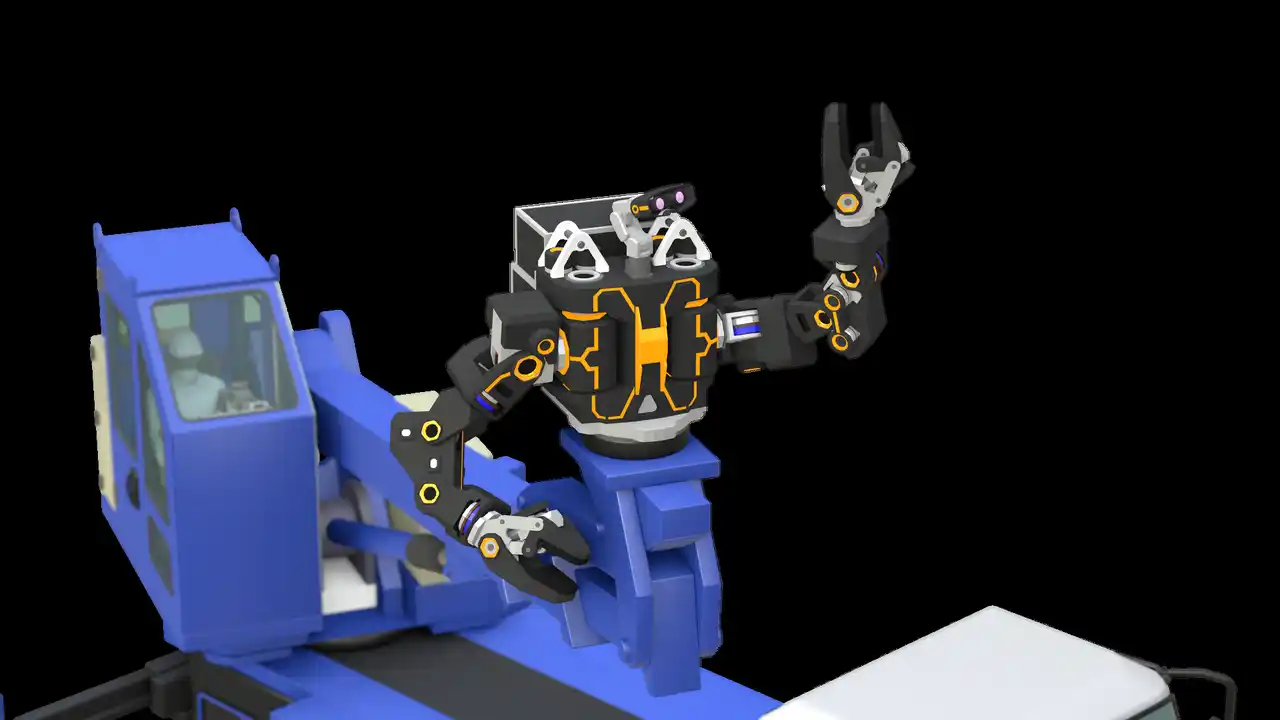
零式人機 ver.2.0 |
|
|
|
|
|
|
零二式人機 ver.1.0 |
|
|
|
|
|
|
|
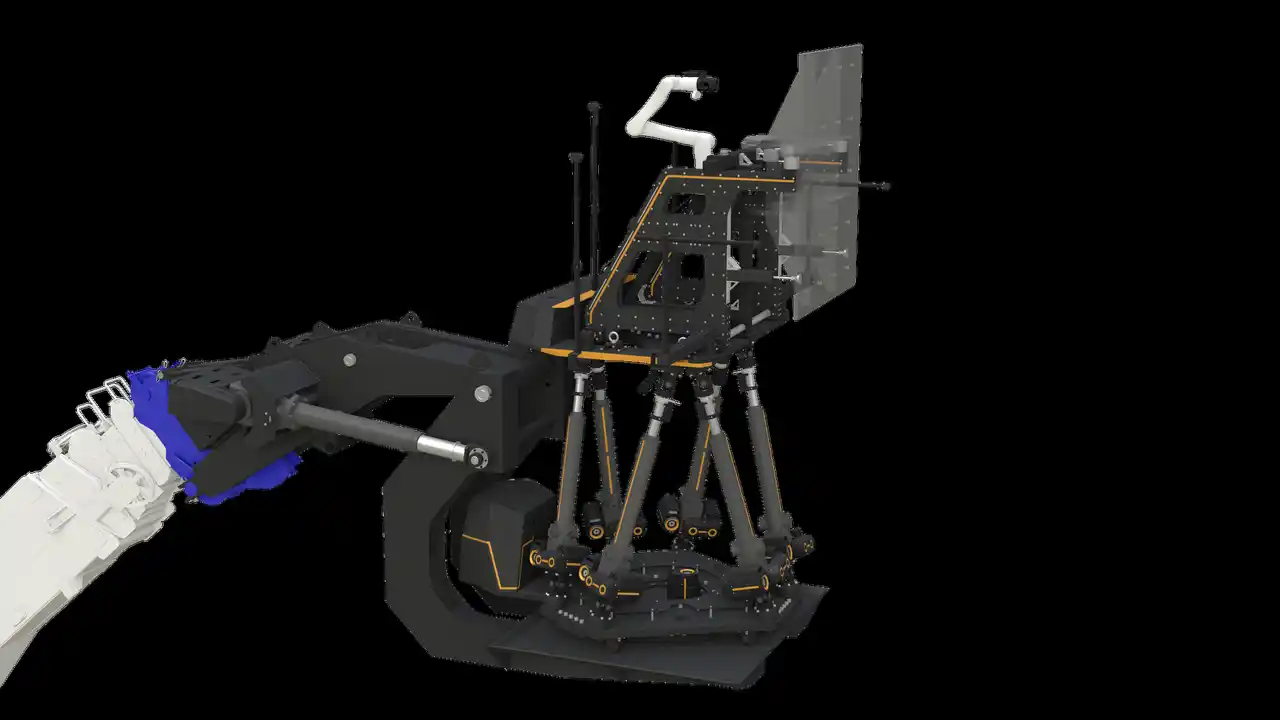
人機スチュワートプラットフォーム ver.2.0 |
|
|

|
|
|
|
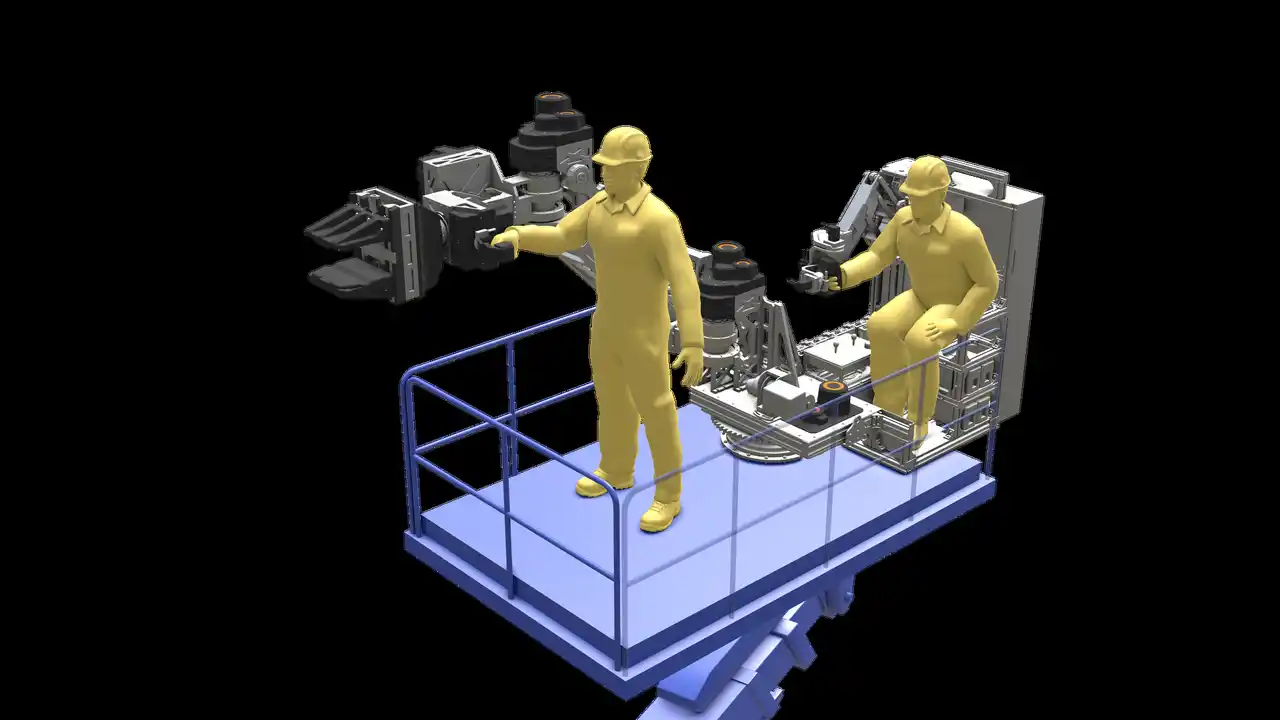
人機カート ver.3.0 |
|
|
|
|
|
■ 協働ロボットを用いての「技術の深化」
|
|
|
|
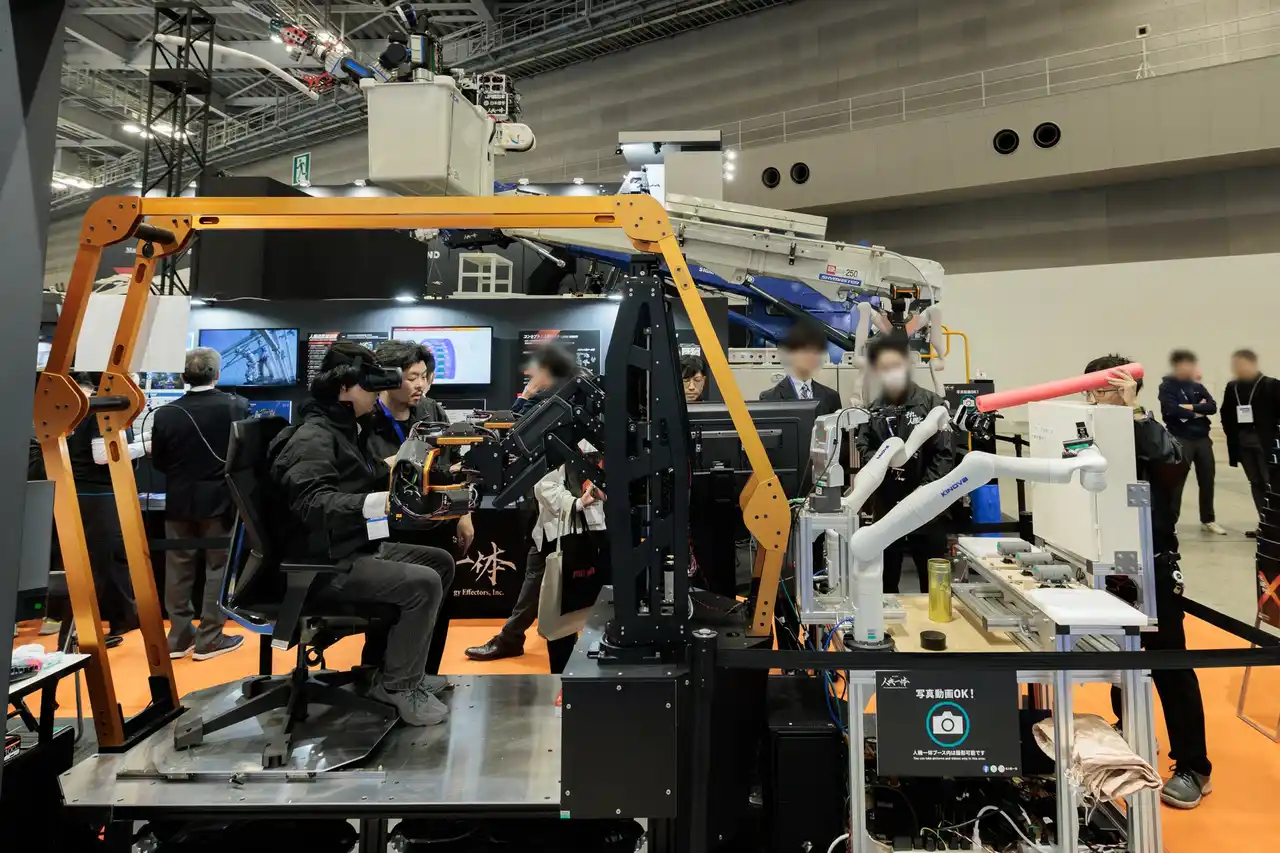
上記のようなゼロベース設計による PoC 試作機開発と同時並行で、協働ロボットを評価機として用いて、特異姿勢回避、無限回転機構を活用した遠隔操作技術の実装など、ロボットアームの制御性、操作性向上に重点を置いた、基礎研究・評価を繰り返してまいりました。人機一体社の力制御技術は独自でありながら、多くの協働ロボットアームに実装可能な汎用性を持つことから、これまでも例えば、加 Kinova 社製 7 軸ロボットアーム Gen3 に実装され、昨年 12 月に開催された 2025 国際ロボット展(iREX2025)にて多くの来場者に直感的な操作を体感いただきました。 |
|
|
|
|
|
|
2025 国際ロボット展での様子 |
|
|
|
|
・関連リリース(2025/11/20)
株式会社人機一体は、世界最大級のロボット専門展「2025 国際ロボット展(iREX2025)」に出展します。│ 人機一体
|
|
|
|
■ 協働ロボットを用いての「ビジネス展開」:今、苦役に悩む現場への早期社会実装を可能とする汎用ロボットプラットフォームの構築
|
|
|
|
人機一体社は、これら「ゼロベース設計による専用機の開発」で培った力制御・パワー増幅バイラテラル制御の知見と、「協働ロボットアームを用いた基礎研究」で蓄積した実装ノウハウの双方を土台とし、人機一体社がターゲットとして見据える重筋作業現場への早期社会実装に向けた新たな取組を開始いたしました。 |
|
本取組においては、人機一体社独自の力制御・パワー増幅バイラテラル制御技術を、人機一体社のターゲットである重筋作業現場での運用に耐えうる既製品の協働ロボットへ実装して「人機バイラテラルアーム」を実現することで、今、苦役に悩む現場への早期社会実装を可能とする汎用ロボットプラットフォームの構築を進めております。 |
|
|

|
|
|
|
人機バイラテラルアーム CG イメージ |
|
|
|
|
|
本取組の狙い:社会実装への最速ルートを構築 |
|
|
|
本プロジェクトの特徴は「独自の力制御・パワー増幅バイラテラル制御技術の最速での社会実装」にあります。 |
|
|
|
1. |
実装スピードの向上、開発コストの削減
人機バイラテラルアームは、人機一体社の独自技術によって、大出力で巧緻な力制御と直感的操作が可能なバワー増幅バイラテラル制御を実現しつつも、多様な協働ロボットを用いることで、ハードウェアを独自開発する場合に発生する研究開発・実証期間をスキップし、現場導入までのリードタイムとコストを大幅に短縮します。 |
|
|
2. |
自動化困難作業の機械化
多品種少量生産の工場ラインや不定型作業など、自動化システムの構築が難しい環境においても、人機バイラテラルアームは「電源に繋ぐだけですぐ使える」ため、作業者の身体拡張装置として臨機応変に設置、運用可能です。 |
|
|
3. |
RaaS による導入・維持コストの削減
人機バイラテラルアームは、RaaS(Robotics as a Service)として提供されるため、ユーザにとっては、導入コストや潜在的な保守・修理コストを削減することが可能です。 |
|
|
|
|
|
|
|
Japan IT Week 2026【春】(アドバンテック社ブース内)にて初公開 |
|
|
|
アドバンテック株式会社(本社:東京都台東区)が出展する Japan IT Week 2026【春】内の「組込み・エッジ・IoT開発EXPO」の同社ブース内にて、人機一体社独自の力制御・パワー増幅バイラテラル制御技術を実装した協働ロボット「人機バイラテラルアーム」を初公開いたします。展示会詳細については、下記の関連リリースを御参照ください。 |
|
|
・関連リリース
<Japan IT Week 2026【春】>人機一体、アドバンテックブースにてロボット実機を展示 │ 人機一体
|
|
|
|
今後の展望 |
|
|
|
人機一体社は、協働ロボットへの独自制御技術の実装と、関連技術開発・ビジネス開発を加速させ、これまで自動化が困難とされていた重筋作業の機械化を推進します。本取組を通じた市場開拓やニーズ探索により、早期のプロダクト化およびサービス化を目指します。 |
|
現段階では、以下のようなニーズをいただいており、今後も市場開拓を推進してまいります。(一例) |
|
|
|
• |
|
狭小なスペースにより、従来の産業用ロボット導入が困難な製造現場 |
|
|
• |
|
多品種少量生産や頻繁なライン変更が求められ、自動化のハードルが高い現場 |
|
|
• |
|
|
• |
|
入室準備に時間を要する、クリーンルーム内での作業工程 |
|
|
|
|
|
|
|
会社情報 |
|
|
|
株式会社人機一体 |
|
|
|
代表者 :金岡博士(Dr. KANAOKA) |
|
秘密基地人機一体:滋賀県草津市青地町 648-1 |
|
福島基地:福島県南相馬市原町区萱浜字巣掛場 45-245 南相馬市産業創造センター |
|
創 立 :2007 年 10 月 01 日 |
|
創 業 :2015 年 10 月 01 日(現商号への変更日) |
|
資本金 :1 億円 |
|
事業内容:先端ロボット工学技術に基づく新規事業開発支援のための知的財産活用サービス |
|
URL :https://www.jinki.jp/
|
|
|
|
|
|

