|
株式会社GA Robotics(ジーエーロボティクス)は、2026年4月15日(水)~17日(金)に東京ビッグサイトで開催される「ヒューマノイドロボットエキスポ2026」(小間番号:21-29)に出展し、UBTECH社製ヒューマノイドロボット「Walker Tienkung」の実機デモンストレーションを実施します。 |
|
|
|
|
|
|
|
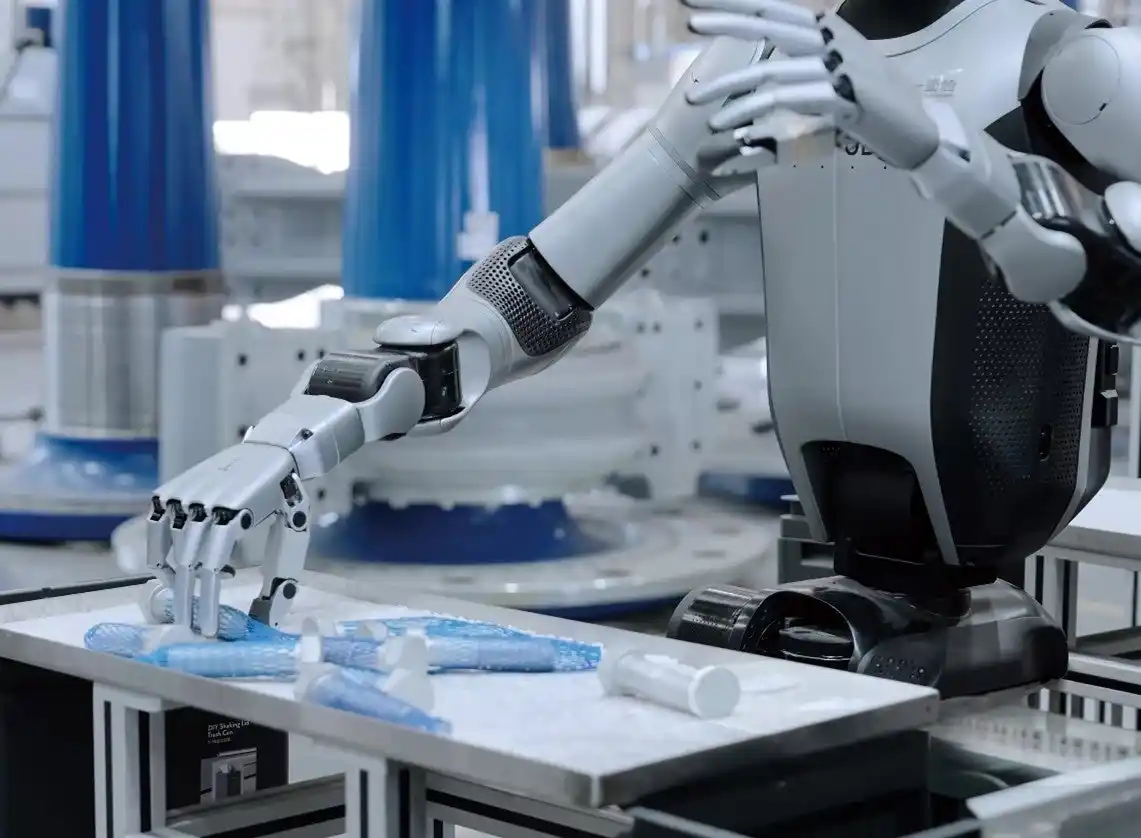
■ デモ概要:ダイレクトティーチングによるボルトピック |
|
|
|
本デモは、ダイレクトティーチング(直接教示)によって生成された動作軌道を用いて実行されます。あらかじめ設定された軌道に基づき、 |
|
|
|
|
|
|
|
を一連のシーケンスとして再現します。 |
|
視覚認識を用いた自律補正ではなく、精密に教示された軌道と指制御の再現性により、安定した把持動作を実現します。 |
|
|
|
■ 独立駆動ハンドの技術的特長 |
|
|
|
Walker Tienkungは、各指が独立して駆動・制御可能な多自由度ハンドを搭載しています。 |
|
|
|
技術的ポイント |
|
|
|
|
|
|
|
ボルトのような小径部品は、 |
|
|
|
|
|
|
|
といった難しさがあります。 |
|
本機は、指単位での精密制御により、小物部品を確実に摘み上げる巧緻性を示します。 |
|
|
|
■ 双腕最大14kgの可搬能力 |
|
|
|
Walker Tienkungは、双腕合計最大14kgの可搬能力を有します。 |
|
今回の展示では小物部品を扱いますが、上肢は十分な関節トルクを備えており、軽作業に限定されない設計思想となっています。 |
|
|
|
■ 身長172cm ― 既存工程への適応 |
|
|
|
Walker Tienkungの身長は172cm。人間と同等スケールで設計されているため、 |
|
|
|
|
|
|
|
が可能です。 |
|
ヒューマノイド導入時の設備改修負担を抑え、段階的な実装を見据えた設計となっています。 |
|
|
|
■ 開催概要 |
|
|
|
• |
|
|
• |
|
会期:2026年4月15日(水)~ 4月17日(金) |
|
|
• |
|
|
• |
|
|
|
|
|
|
|
|
|
Walker Tienkung |
|
|
|
|
|
|
|
Walker Tienkungは、高度な二足歩行制御技術と精密なハンドマニピュレーション能力を備えたヒューマノイドロボットです。本デモでは、物体認識・動作計画・力制御を統合したフィジカルAI技術により、人の指先動作に近い繊細なピッキング作業を行い、製造業・物流分野をはじめとする実運用への可能性をご紹介します。 |
|
製品ページ: |
|
https://ga-robotics.co.jp/products/walker-tienkung/ |
|
|
|
GA Roboticsは、本展示を通じて、ヒューマノイドロボットが人と協調しながら働く未来像と、産業現場における次世代ロボティクスの実装イメージを来場者の皆様にご提案します。 |
|
株式会社GA Robotics(ジーエーロボティクス)は、2026年4月15日(水)~17日(金)に東京ビッグサイトで開催される「ヒューマノイドロボットエキスポ2026」(小間番号:21-29)に出展し、UBTECH社製ヒューマノイドロボット「Walker Tienkung」の実機デモンストレーションを実施します。