|
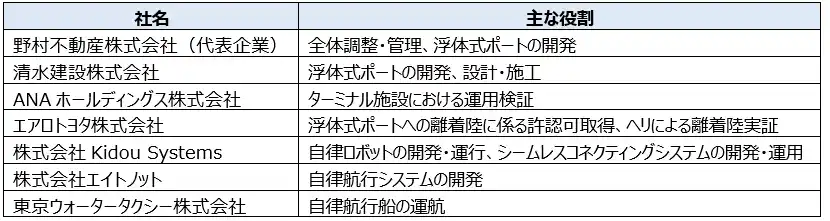
野村不動産株式会社(代表事業者、本社:東京都港区/代表取締役社長:松尾大作)、清水建設株式会社(本社:東京都中央区/取締役社長:新村達也)、ANA ホールディングス株式会社(本社:東京都港区/代表取締役社長:芝田浩二)、エアロトヨタ株式会社(本社:東京都江東区/代表取締役社長:加藤浩士)、株式会社Kidou
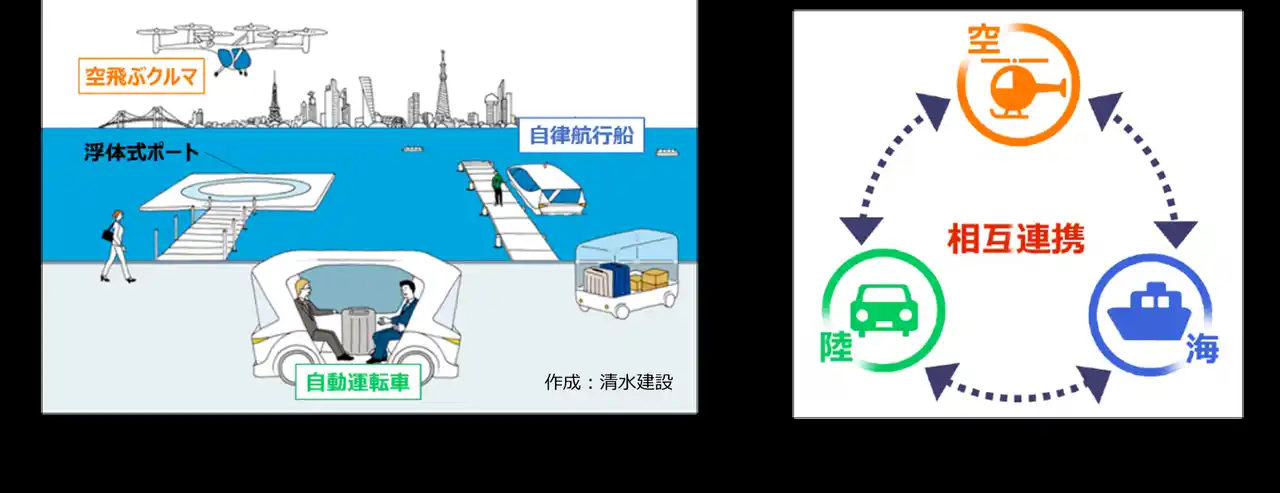
Systems(本社:東京都墨田区/CEO:塩野晧士)、株式会社エイトノット(本社:大阪府堺市/代表取締役:木村裕人)、東京ウォータータクシー株式会社(本社:東京都港区/代表取締役社長:石井友章)で構成される事業グループは、東京都が実施する東京ベイeSG プロジェクト「先行プロジェクト」※1 の令和5年度の”次世代モビリティ”の応募テーマにおいて、「空飛ぶクルマ(eVTOL)※2 用浮体式ポートを核とした、陸海空のマルチモーダル MaaS 実現に向けたシステムの構築及び運行実証」(以下、本事業)が採択され、2023 年10 月より事業を推進してまいりました。 |
|
|
|
|
|
|
|
2025 年12 月には、本事業において2 度目となる実証実験を行い、外海に設置した浮体式ポートでの空飛ぶクルマを想定したヘリコプターによる離着陸実証や自律航行船※3 による運航実証に成功したほか、ターミナル施設でのオペレーションの検証や各モビリティの相互連携を支援するシームレスコネクティングシステム※4 の動作検証、複数台の自律ロボットによる運行実証などを実施いたしました。 |
|
当事業グループの「東京ベイeSG プロジェクト 令和5 年度先行プロジェクト」に関する取組みは、2026 年3 月末をもちまして事業期間満了となります。本事業で得られた成果・知見をもとに、今後も当事業グループは、陸・海・空の次世代モビリティの社会実装に向けた取組みを続け、都市機能の強化や地域活性化等の社会課題の解決を通じ、より豊かな社会の実現に貢献してまいります。 |
|
|
|
※1 自然と便利が融合した持続可能な都市の実現に向け、中央防波堤を実証フィールドとして活用し、最先端テクノロジーの社会実装に取り組むプロジェクト |
|
https://www.tokyobayesg.metro.tokyo.lg.jp/priorityprojects/r5project_result.html |
|
※2 eVTOL(Electric Vertical Take-Off and Landing aircraft)とは、電動モーターで複数の回転翼を回転させ、垂直離着陸できる小型航空機を指す。「空飛ぶクルマ」とも称され、渋滞の緩和や温暖化への対策等、より豊かで持続可能な社会の実現に貢献する新たなモビリティとして世界各国で開発が進められている |
|
※3 自律航行:船舶が人的介入なしで周囲の環境を認識し、判断・制御を行う技術 |
|
※4 陸・海・空の各モビリティの相互連携を支援するシステム |
|
|
|
■2025 年12 月の実証内容 |
|
【実証テーマ】 |
|
空飛ぶクルマ(eVTOL) 用浮体式ポートを核とした、陸海空のマルチモーダル MaaS 実現に向けた |
|
システムの構築及び運行実証 |
|
【本事業における各社の役割】 |
|
|
|
|
|
|
|
【実証詳細】 |
|
1. 浮体式ポート |
|
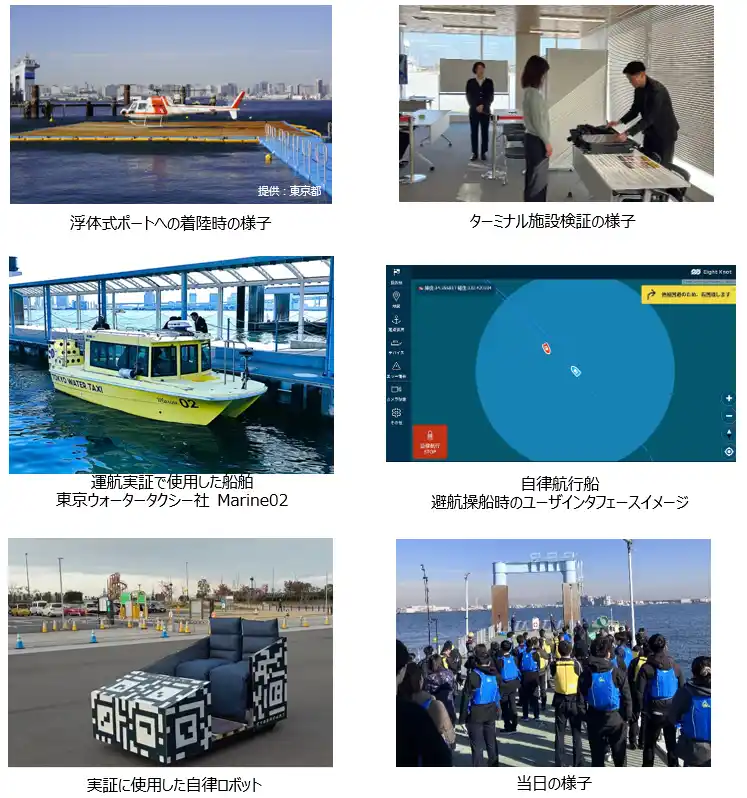
外海(閉鎖水域外)に空飛ぶクルマ用の浮体式ポートを設置し、小型ヘリコプターによる離着陸実証を実施し、波や風の影響を受けやすい閉鎖水域外においても、国がバーティポート※5 に対して求めている水準を満たす性能を有するか等について検証いたしました。 |
|
2. ターミナル施設 |
|
2 つのFATO※6 が設置されたバーティポートを想定し、ターミナル施設での保安検査や旅客誘導等のオペレーションを検証いたしました。同規模の施設の運用に必要な人員数、動線計画を確認し、手続きの機械化・省人化が必要な箇所の特定を行いました。 |
|
3. 自律航行船 |
|
日の出-海の森間の自律航行実証を実施いたしました。1 度目の実証から、避航操船アルゴリズムの高度化及びユーザインタフェースの改善を実施し、改善後のソフトウェアを反映して、問題なく運航ルートを自律航行できることを確認いたしました。 |
|
4. 自律ロボット |
|
1 度目の実証において課題となっていたシステム改善を実施し、複数台の協調制御に加え、運行通知による自律ロボットの動作の検証を行いました。 |
|
5. シームレスコネクティングシステム(SCS) |
|
複数の異なる種類のモビリティの動きを一つのソフトウェアインターフェイス上で管理できることを確認いたしました。また、1度目の実証で確認された通信不具合にも対応し、自律ロボットに対して運行指令を発出することができました。 |
|
|
|
※5 バーティポート:空飛ぶクルマ専用の離着陸場 |
|
※6 FATO:Final Approach and Take-Off area の略。空飛ぶクルマの離着陸帯 |
|
|
|
|
|
【実証時の様子(2025 年12 月)】 |
|
|
|
|
|