|
|
|
|
|
京都リサーチパーク株式会社(本社:京都市下京区、代表取締役社長:浅野貢男、以下、KRP)は、運営する京都リサーチパーク地区(以下、KRP地区)を「このまち全体が実証実験フィールド 『KRP未来実験場』」と位置づけ、企業・団体向けに実証実験の場を提供しています。この度、2026年春からKRP地区の駐車場にて、スズキ株式会社(以下、スズキ)が現在開発中の「モビリティ連携基盤」を用いたインフラ管制自動走行システムの実証実験を本格始動します。 |
|
|
|
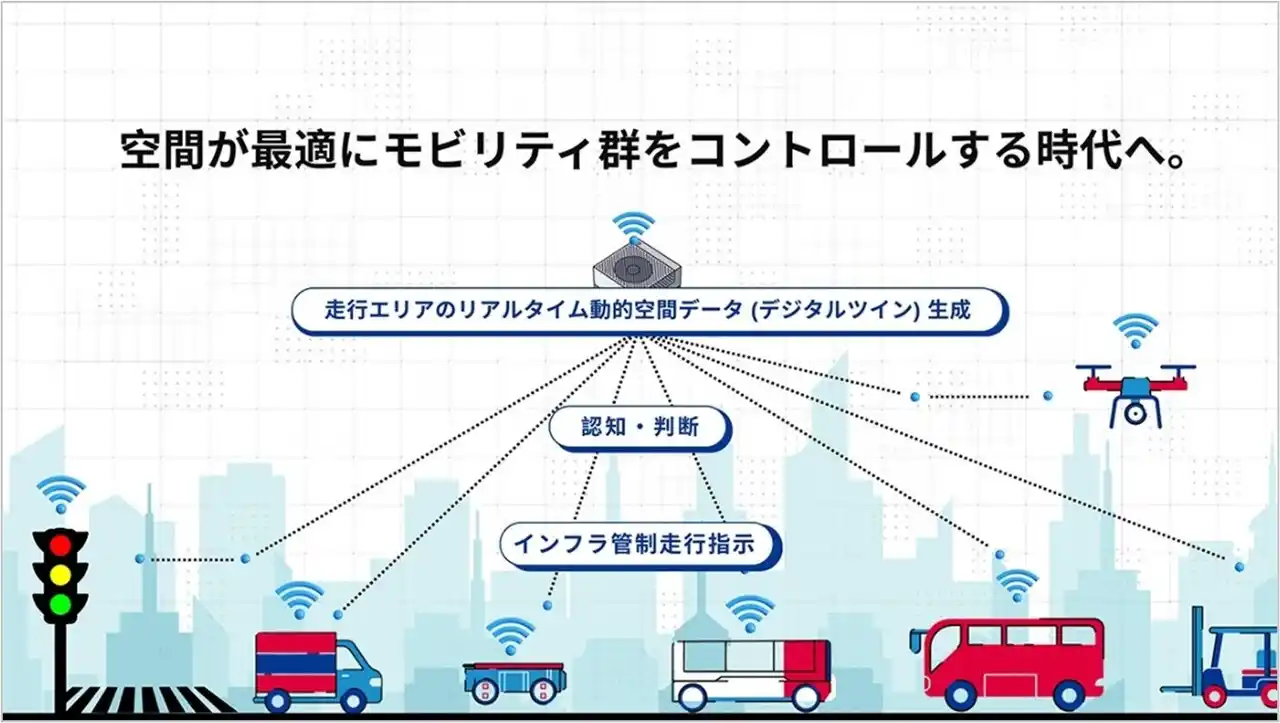
本実証実験は、駐車場内に設置したLiDARで取得した空間情報と動的情報をもとにリアルタイムなデジタルツインを生成し、そのデータを用いてモビリティを制御することで、モビリティ側にセンシングや自律制御を持たずに自動走行を実現する、“インフラ管制型自動走行”の実現性を検証します。 |
|
さらに、スズキはKRP地区へ入居し、本実証実験の研究開発を強化していきます。 |
|
|
|
■KRP地区の実証実験に関する取り組み |
|
|
KRP地区は、約59,000平方メートル の敷地に18棟の建物が立ち並ぶ一大ビジネス拠点です。(以下マップ参照)
ここには 510社6,000人が集い、新事業・研究開発に向けたさまざまな挑戦が日々行われています。 |
|
オフィスやラボ、商業店舗や貸し会議室を備えるビル群、緑豊かな屋外共用スペースなど、多彩な環境を有するKRP地区全体を「このまち全体が実証実験フィールド『KRP未来実験場』」と位置づけ、新しい技術やサービスの開発に向けた実証実験に対し、実験場所を無償提供しています。 |
|
昨年1月に公募を開始してから、既に10件以上の実証実験を受け入れています。実施した内容は、スズキのようなシステム開発をはじめデータ計測など多種多様で、多くの企業さま・機関さまに、仮説検証や社会実装に向けた検証の場としてご活用いただいています。 |
|
|

|
|
|
|
KRP地区 エリアマップ |
|
|
|
|
WEB「KRP未来実験場」:https://www.krp.co.jp/testbed/case/
|
|
WEB「KRP未来実験場」実証実験マップ:https://www.krp.co.jp/testbed/img/demomap.pdf
|
|
|
|
|
|
■スズキとKRP未来実験場 |
|
|
|
1) 実証実験の背景
|
|
|
|
KRPは、2022年から2023年にかけて、株式会社ハイパーデジタルツイン(東京都中央区、代表取締役:伊東
敏夫、以下、HDT)と、芝浦工業大学(東京都江東区、学長:山田純)の新熊亮一教授の研究室が実施する、デジタルツインによる自律走行型ロボットの走行実験に対し、フィールドの提供を行ってきました。その後、HDTとスズキの共同開発プロジェクトが立ち上がったことを機に、新熊教授の紹介により、実証実験のフィールド提供に取り組むKRPと、スズキが接点を持つことになりました。
スズキは複数の実証実験候補地の中から、実験時に必要な環境や立地等の条件から評価した結果、KRPが実験場所として選定され、今回の実証実験の実施が確定しました。また、本実証実験をきっかけに、スズキはKRP地区にオフィスを構え、実験推進体制を整備するとともに「京都ビッグデータ活用プラットフォーム」に参画する等、産学連携も強化しています。 |
|
|
|
|
|
2) 実証実験の概要 |
|
|
|
KRP地区の駐車場内にて、スズキが現在開発中の「モビリティ連携基盤」によるインフラ管制自動走行システムの実証実験を行います。主なポイントは以下の通りです。 |
|
1. 目的 |
|
高精度デジタルツインに基づくインフラ管制方式で、複数台のモビリティが混在する環境下でも安全かつ効率的に自動走行ができる実現性を検証します。 |
|
2. 方式 |
|
●駐車場内に複数台設置したLiDARのセンシング機能で、障害物などの空間情報と、歩行者や車両などの動的情報を取得します。 |
●取得情報をリアルタイムなデジタルツインを仮想空間上に自動生成します。
●生成したデジタルツインデータを用いて指示情報を生成、モビリティに無線通信によって指示し、運行を制御します。 |
|
|
|
|
|
|
|
3. 新規性と期待される効果 |
|
本技術は、高精度でリアルタイムなデジタルツイン技術により、自動走行するモビリティ側にはセンサや自律制御機能は持たせず、必要な認知・判断機能はすべてデジタルツイン情報で制御し、自動走行を実現します。そのため、モビリティ側に各種機器を搭載する必要がなくなることで、車両のコスト削減・軽量化・死角のないより安全な走行を実現することができます。さらには、インフラ側で運行を制御するため、複数のモビリティを同一インフラで一元管理でき、相互の干渉を回避しながら協調走行が可能になります。 |
|
|
|
<用語解説> |
|
LiDAR:赤外線レーザーを利用し、対象物の位置を測定するセンサ |
|
デジタルツイン:現実の物理空間をデジタルで仮想的にコンピュータ上に再現する技術 |
|
4. 実施場所・期間 |
|
実施場所:KRP西屋外駐車場、他 |
|
実験開始:2026年春頃本格開始予定 |
|
|
|
■KRP未来実験場を利用するにあたってのコメント |
|
|
|
スズキ株式会社 次世代モビリティサービス本部 モビリティ連携基盤開発部 |
|
部長 杉村 嘉秋様 |
|
「このたび、京都リサーチパーク様にて、当社が開発を進めるモビリティ連携基盤システムの実証実験を開始できることを大変嬉しく思います。本実証では、より実環境に近い状況で検証を実施することで、将来の社会実装に向けた技術的な課題を明確にしていきます。多様な企業・研究機関が集うKRP地区というフィールドを活かし、空間情報を活用した新たなモビリティインフラの実現を目指してまいります。」 |
|
|
 |
|
|
|
■京都リサーチパークとは: |
|
全国初の民間運営によるサイエンスパークとして1989年に開設。京都府・京都市の産業支援機関などを含めて510組織・6,000人が集積。オフィス・ラボ賃貸、貸会議室に加え、起業家育成、オープンイノベーション支援、セミナー・交流イベント開催など、新ビジネス・新産業創出に繋がる様々な活動を実施。「ここで、創発。~Paving for New Tomorrow~」をブランドスローガンとして、イノベーションを起こそうとする世界中の方々に、魅力的な交流の舞台、事業環境を提供することを通じて、世界を変える新たな事業が生まれることに貢献します。 |
|