| 従来の触覚に加え力触覚領域へ本格参入し、ロボット・フィジカルAI等における「手」のインタラクションを高度化 |
|
Diver-X株式会社(本社:東京都千代田区、代表取締役:迫田大翔、以下Diver-X)は、株式会社クロステック・マネジメント(本社:京都府京都市、代表取締役:北村誠、以下、クロステック・マネジメント)より、力触覚提示(フォースフィードバック)デバイス「EXOS(エクソス)」シリーズに関する事業ライセンスを2025年12月1日、取得したことをお知らせします。 Diver-Xは従来、触覚フィードバック技術※1 を中心にデバイス開発を展開してきましたが、今回の事業取得により、力触覚(フォースフィードバック)※2 およびロボットハンド領域の事業開発を本格化させます。 既存の技術資産と「EXOS(エクソス)」の技術を統合することで、”手”に関わるあらゆるインタラクションを包括的に提供する体制の構築が可能になりました。 |
|||||||
|
※1 デバイスが振動や物理的な刺激(力、質感など)をユーザーに与えることで、実際に触れたような「手応え」や「存在感」を伝える技術。 ※2 物を触ったり手にしたりしたときの手ごたえとしての感覚で、物から受ける応力により、硬さや軟らかさ、弾力性、動きなどを把握する感覚。 |
|||||||
|
|||||||
|
|
|||||||
| ライセンス取得の背景 | |||||||
|
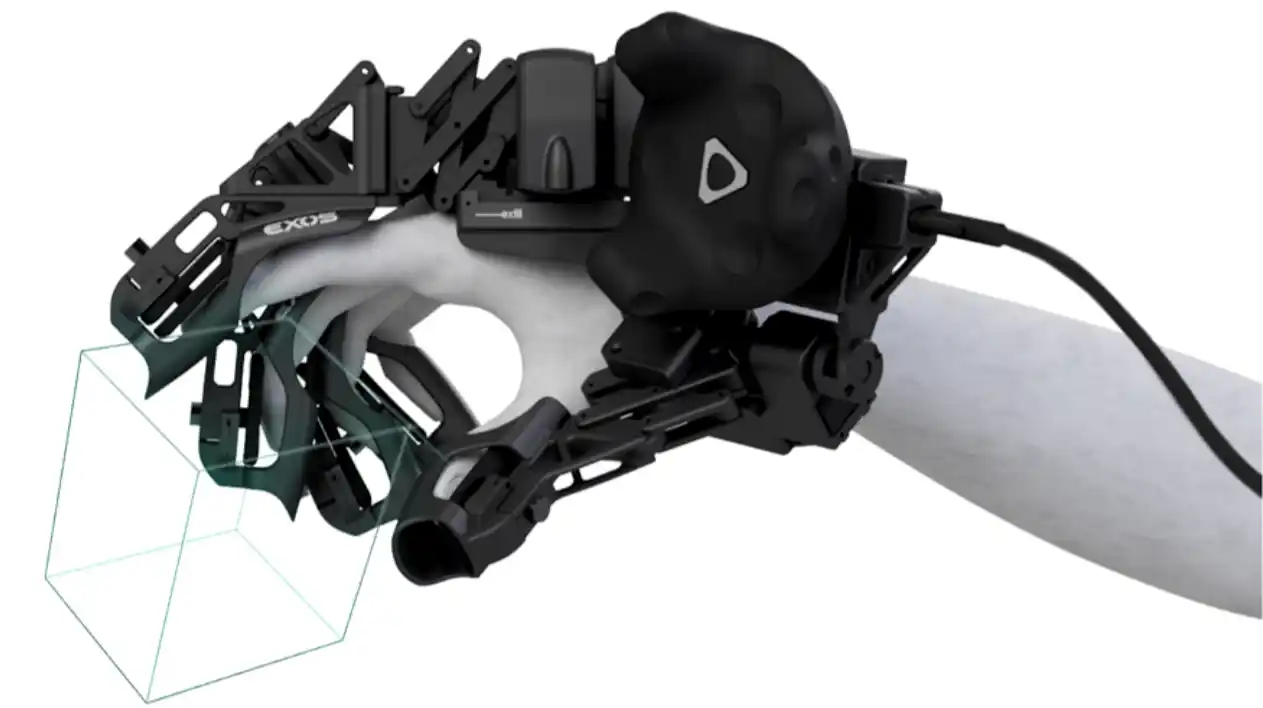
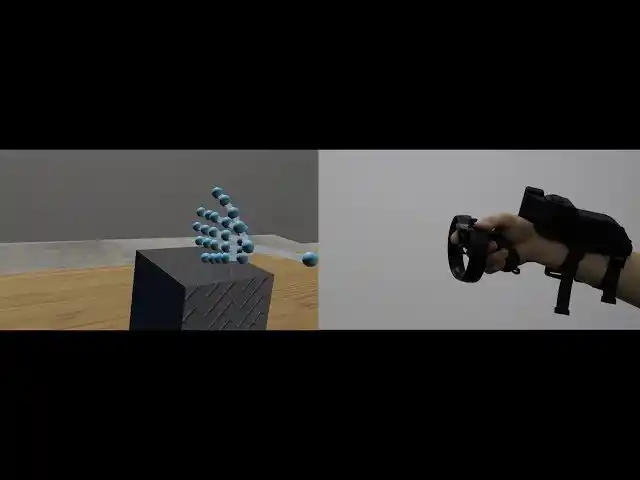
「EXOS(エクソス)」シリーズは、力触覚(フォースフィードバック)技術によりVR(仮想現実)において、CGの物体に触れた際の反力を再現する外骨格型デバイスとしてexiii株式会社によって開発され、同社の解散に伴いクロステック・マネジメントが継承していました。 一方でDiver-Xは、グローブ型のVRコントローラ「ContactGlove」シリーズの開発において、高精度なハンドセンシングと触覚フィードバック技術を社会実装する中で、実空間のような”手ごたえ” や”重さ”を再現するためには、皮膚感覚に働きかける「触覚」だけでなく、筋肉や腱に作用する力触覚(フォースフィードバック)の技術が不可欠であるとの結論に至りました。 そこでこの度、XR領域におけるハンドインターフェースのさらなる発展と普及を目指し、クロステック・マネジメントより「EXOS(エクソス)」ライセンスを取得し、力触覚提示デバイス・ロボットハンドの開発展開へ重点的に取り組みます。 |
|||||||
|
|
|||||||
|
|
|||||||
| 今後の事業展開:触覚から力触覚へ、そしてフィジカルAIへ | |||||||
| 今後は、Diver-Xの強みである既存の触覚技術と、今回取得した力触覚技術を掛け合わせることで、XR領域における没入感の向上だけでなく、さらにロボットの遠隔操作(テレオペレーション)や、急速に発展するフィジカルAI分野における学習データ収集など、実世界とデジタルが高度に融合する分野において、次世代のインターフェースソリューションを提供してゆきます。 | |||||||
|
|||||||
|
|
|||||||
| ライセンス取得の主な対象 | |||||||
|
本契約により、弊社は以下の製品・技術に関する権利および関連する知的財産権の使用許諾 を受け、今後の事業展開に活用してまいります。 ● 関連知的財産一式 ● EXOS Wrist(手首の動作に力触覚を与えるデバイス) ● 五指触覚グローブ(指先の感触を再現するグローブ型デバイス) ● Hand Unit(ロボットハンド等の基盤ユニット) |
|||||||
|
|||||||
 |
|||||||
| https://www.youtube.com/watch?v=eILxTduU8OU | |||||||
 |
|||||||
| https://www.youtube.com/watch?v=7AjKKttW_nw | |||||||
|
|
|||||||
|
元 exiii株式会社 代表取締役 山浦博志氏からのコメント |
|||||||
| ※現 Curious Robotics株式会社 代表取締役 | |||||||
|
|||||||
|
|
|||||||
|
|
|||||||
|
|||||||