-新たな機能を付加した2機種の現場実証-
安藤ハザマ(本社:東京都港区、代表取締役社長:国谷 一彦)は、ICTにより山岳トンネル工事の生産性を大幅に高める取り組みとして「山岳トンネル統合型掘削管理システム(i-NATM(R))」の開発を推進しています(注1)。この取り組みの一環として、三井三池製作所(本店:東京都中央区、代表取締役社長:中村 元彦)と共同で、機械掘削工法における自動掘削・遠隔操作を実現する「AI-ロードヘッダ」の開発を進めています。
今回、AI-ロードヘッダに新たな機能を付加した新型機2種を開発し、実現場導入による長期実証試験を開始しました(写真1、2)。

写真1:AI-ロードヘッダ MRH-S200Gi

写真2:AI-ロードヘッダ SLB-300Si
【1.開発の背景】
建設業界では就労者の高齢化や人口減少の影響により、熟練技能者の技術の喪失、労働力不足などの課題に直面しています。ICTを活用した生産性の向上が必須であり、熟練技能者の持つ知見を暗黙知から形式知化する必要があります。
山岳トンネル工事において切羽作業は最も危険な作業であるとともに、作業の多くが粉じんを伴うことから健康被害も懸念されます。その中で、機械掘削工法では、重機オペレーターが長時間の粉じん発生作業に従事するため、この作業を無人化することは生産性向上のみならず、安全面・環境面からも重要です。
【2.開発の経過】
2023年6月に「令和3年度 中部縦貫坊方トンネル工事」(注2)において、AI-ロードヘッダ MRH-S200i(写真3)による自動掘削および遠隔掘削の実証試験を行い、その有効性を確認しました。

写真3:AI-ロードヘッダ MRH-S200i
さらに、実証試験で得た知見をもとに、「ずり積込み作業の効率向上」を目的として集土・排土の機能を付加した、積込み機能付きAI-ロードヘッダ MRH-S200Gi(写真1)(注3)や、大型化により作業性を向上させたAI-ロードヘッダ SLB-300Si(写真2)を新たに開発し、工場試験などを行ってきました。
そして今回、開発したMRH-S200Giを「大分210号川下トンネル新設工事」(注4)に導入、SLB-300Siを「R5国道246号厚木秦野道路伊勢原第一トンネル工事」(注5)に導入し、新機能を含む作業性確認を目的とした長期実証試験を行うこととなりました。
【3.新型AI-ロードヘッダの特徴と改良点】
(1)積込み機能付きAI-ロードヘッダ MRH-S200Gi
MRH-S200Giは機体後方に装備したコンベヤにより、掘削したずりをダンプトラックへ直接積み込むことが可能です(写真4、5)。

写真4:MRH-S200Gi実証試験状況(集土)

写真5:MRH-S200Gi実証試験状況(排土)
(2)AI-ロードヘッダ SLB-300Si
SLB-300Siは出力向上のほか、大型化により施工範囲が広がり高速道路トンネルなどにおける全断面掘削が可能となりました(図1、写真6)。
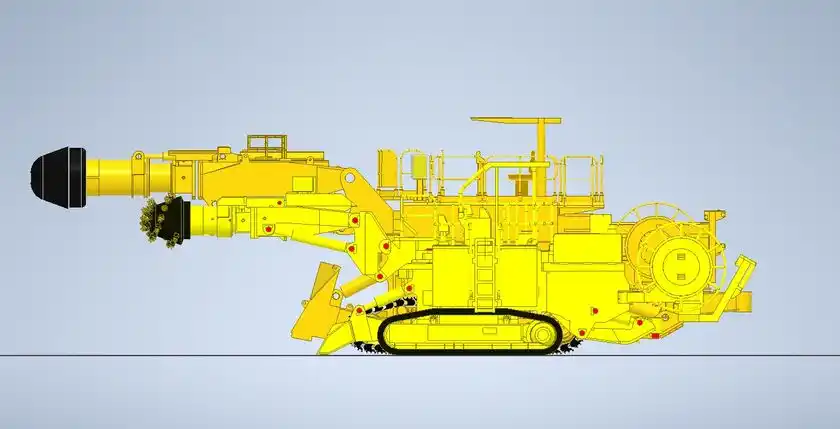
図1:AI-ロードヘッダ大きさ比較(手前MRH-S200i 奥SLB-300Si)

写真6:SLB-300Si実証試験状況
また、新型AI-ロードヘッダは、従来(MRH-S200i)と比較して以下の機能が向上しました。
(1)自動運転機能
AI-ロードヘッダ自身の位置と掘削対象となる切羽面の位置を把握し、切削ブーム先端に設置されたドラムの移動経路を生成することで自動掘削を行います。切削中の負荷からドラムの速度を自動的に調整し、機械が最適な運転を行います。
新型機では、現場で一般的に使用する計測システムを用いて、短時間での自己位置把握が可能となりました。
(2)遠隔操作機能
遠隔地から、AI-ロードヘッダの「移動」「掘削」(MRH-S200Giでは「集土」「排土」も含む)といった一連の操作が可能です。AI-ロードヘッダの機器情報は遠隔操作室のモニターおよび掘削アシストシステム(図2)を用いてリアルタイムに確認することができます(写真7、8)。
前回の実証試験で得た知見をもとに、トラブル時のポップアップ表示やアラート音など、さらに状況把握が容易になるよう改善を行いました。また、掘削アシストシステム(図2)はLiDARにより取得された周辺データを重ねることができるようになり、AI-ロードヘッダと切羽の詳細な位置関係など、より実態を反映した状況把握が可能となりました。
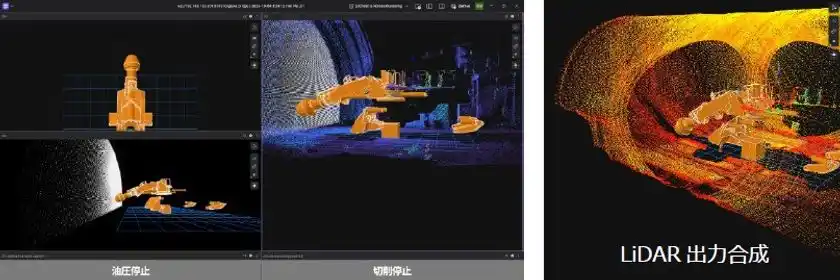
図2:掘削アシストシステム

写真7:現場詰所に設置した遠隔操作ブース

写真8:坑内移動式遠隔操作室
【4.今後の展開】
AI-ロードヘッダは、ラインナップをシリーズ化することにより、さまざまな現場の条件に合わせて運用可能です。長期実証試験により得た知見をAIに活かし、さらなる機能の充実を目指します。
安藤ハザマは、これからも自動化・無人化技術の開発を推進し、山岳トンネル工事のさらなる安全性、生産性向上を目指して取り組んでいきます。
(注1)山岳トンネル統合型掘削管理システム(i-NATM(R))
自動化、遠隔化技術を活用して施工技術の高度化を図るとともに、施工情報を集中管理するプラットフォームを構築し、山岳トンネル施工の抜本的な合理化を進めるもの。
(注2)令和3年度 中部縦貫坊方トンネル工事
発注者:中部地方整備局
施工者:安藤ハザマ
工期 :2022年1月18日~2025年3月31日
(注3)積込み機能付きAI-ロードヘッダの開発
-機械掘削工法における掘削からズリ出しまでの無人化を目指して-
安藤ハザマ2025年2月28日リリース資料を参照
https://www.ad-hzm.co.jp/info/2025/20250228.php
(注4)大分210号川下トンネル新設工事
発注者:九州地方整備局
施工者:安藤ハザマ
工期 :2023年12月6日~2026年3月31日
(注5)R5国道246号厚木秦野道路伊勢原第一トンネル工事
発注者:関東地方整備局
施工者:安藤ハザマ
工期 :2024年3月23日~2026年9月30日
<問い合わせ先>
安藤ハザマ コーポレート・コミュニケーション部
所在地:〒105-7360 東京都港区東新橋 1-9-1
担当 :川井 真理
TEL :03-3575-6094
FAX :03-3575-6017

写真1:AI-ロードヘッダ MRH-S200Gi

写真2:AI-ロードヘッダ SLB-300Si

写真3:AI-ロードヘッダ MRH-S200i

写真4:MRH-S200Gi実証試験状況(集土)

写真5:MRH-S200Gi実証試験状況(排土)
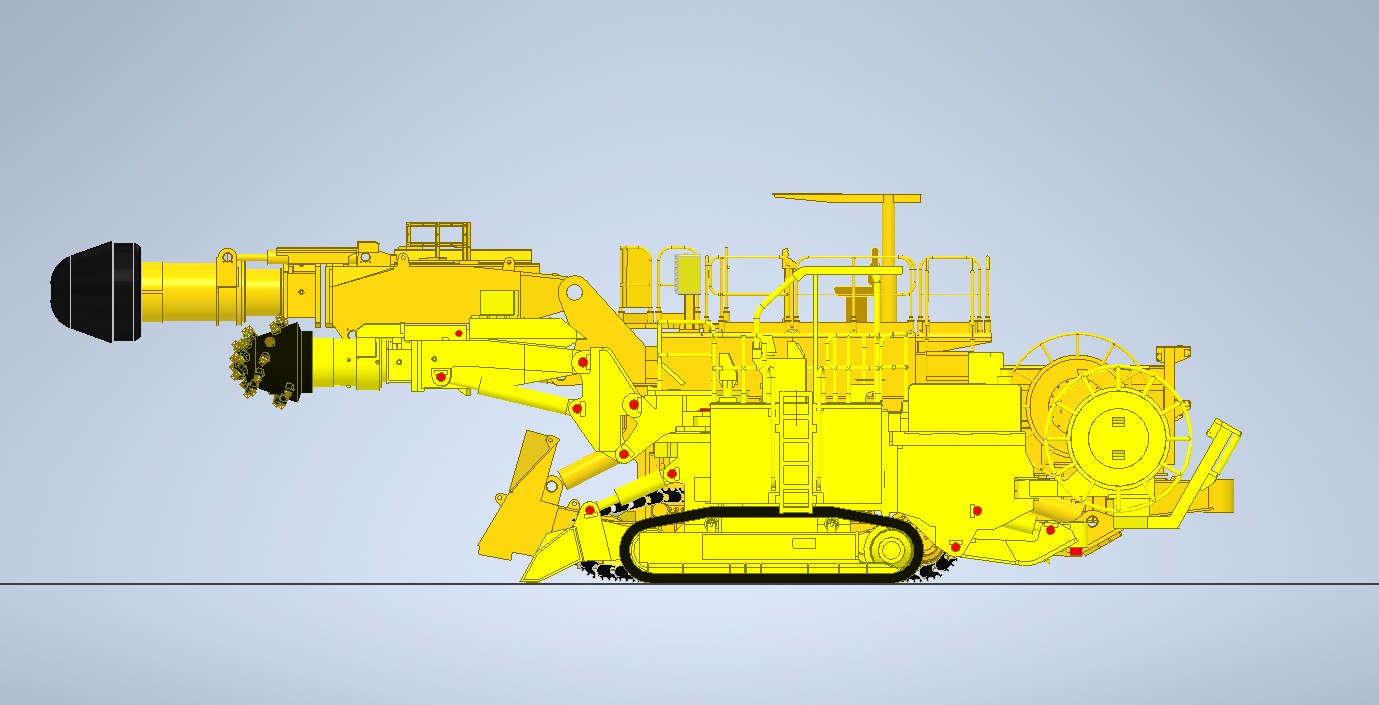
図1:AI-ロードヘッダ大きさ比較(手前MRH-S200i 奥SLB-300Si)

写真7:現場詰所に設置した遠隔操作ブース