| 「自動火薬装填システム」の改良で、作業者1名による連続装填作業が可能に |
| 株式会社大林組(本社:東京都港区、社長:佐藤俊美)は、慶應義塾大学ハプティクス研究センター(センター長:大西公平《新川崎先端研究教育連携スクエア特任教授》、野崎貴裕《理工学部准教授》)と共同で、遠隔で力触覚を再現する技術であるリアルハプティクス(以下、リアルハプティクス)(※1)を応用した「自動火薬装填(そうてん)システム(以下、本システム)」に起爆用爆薬(親ダイ(※2))の供給装置を搭載しました。本改良により切羽(きりは)直下(※3)に作業者が入らない状態で、オペレータ室から1名で連続的な装填作業を行うことに成功しました。 | |||||||||
| 本システムは、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「官民による若手研究者発掘支援事業(若サポ)(※4)」の一環で開発しています。 | |||||||||
 |
|||||||||
| https://www.youtube.com/watch?v=4Oo6FBmTezM | |||||||||
| 自動火薬装填システムの現場適用(動画再生時間:3分52秒) | |||||||||
| 1.自動火薬装填システムについて | |||||||||
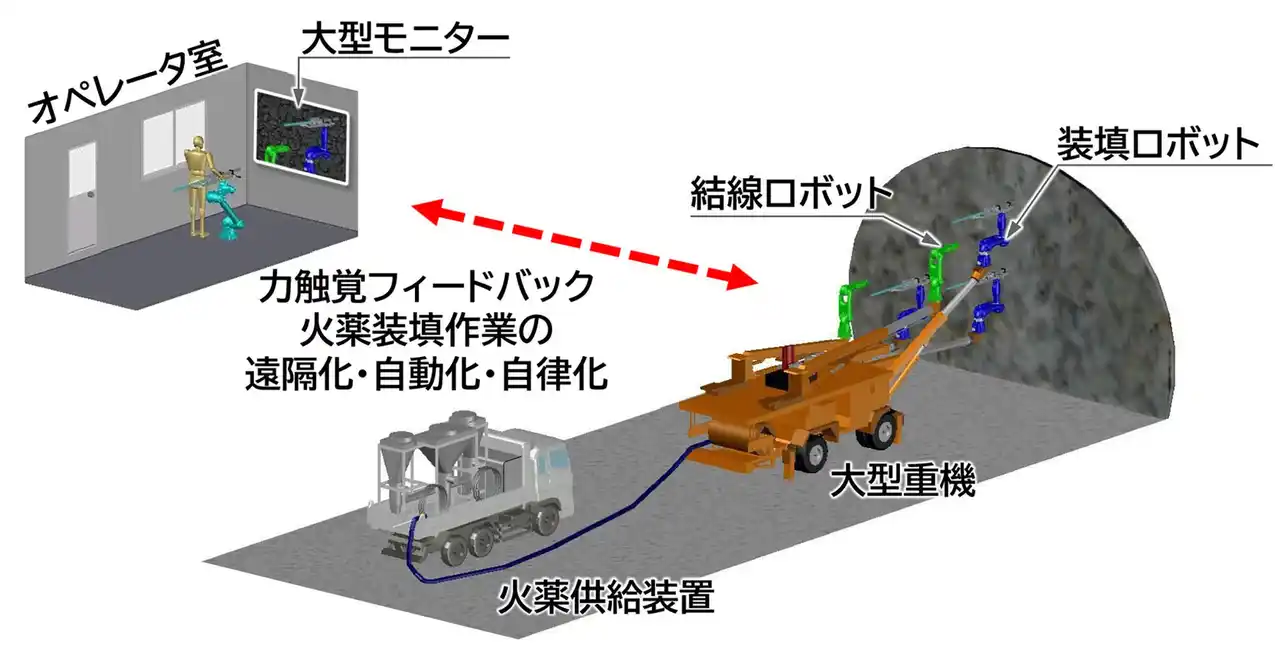
| 山岳トンネルの掘削作業では切羽で岩石が落下する「肌落ち」災害の対策として大型重機による作業の遠隔化・自動化が進んでいます。一方で火薬の装填・結線作業は、火薬や雷管(※5)などの危険性が高い材料や、細かい脚線を取り扱うことから、繊細な力加減や手指の感覚を必要としており、遠隔化・自動化のための機械化ができていませんでした。 | |||||||||
| そこで両者は、リアルハプティクスを応用して、切羽直下での火薬の装填・結線作業を遠隔化・自動化する研究に取り組み、2023年9月に自動火薬装填システムを開発(※6)し、室内試験にてリアルハプティクスを応用し遠隔・自動装填を実現しました。さらに2024年12月に本システムでの実火薬の装填および装薬孔検知技術と連携した自律化に成功(※7)しました。 | |||||||||
|
|||||||||
| 2.装填作業の切羽完全無人化への取り組み | |||||||||
| 本システムは、大型重機で装填ロボットを装薬孔の近くまで移動後、切羽から離れたオペレータ室で装薬孔周辺の映像をモニターで確認しながら、遠隔で火薬を装填する仕組みです。リアルハプティクスにより装填ロボットの力触覚が作業者に伝わるため、あたかも切羽で直接作業を行っているような直感的な作業が可能です。 | |||||||||
| 今回、親ダイ供給装置を本システムに搭載したことにより、火薬の供給が機械化し、装填ロボットへ自動的に取り込むことができました。さらに親ダイ脚線の絡まり防止策を講じたことで、複数孔への装薬が可能になりました。加えて、ロボットアームの設置方法を工夫することで、装填範囲が拡大されました。これにより切羽での装填作業の無人化を実現し、作業者1名で連続的な装填作業に成功しました。 | |||||||||
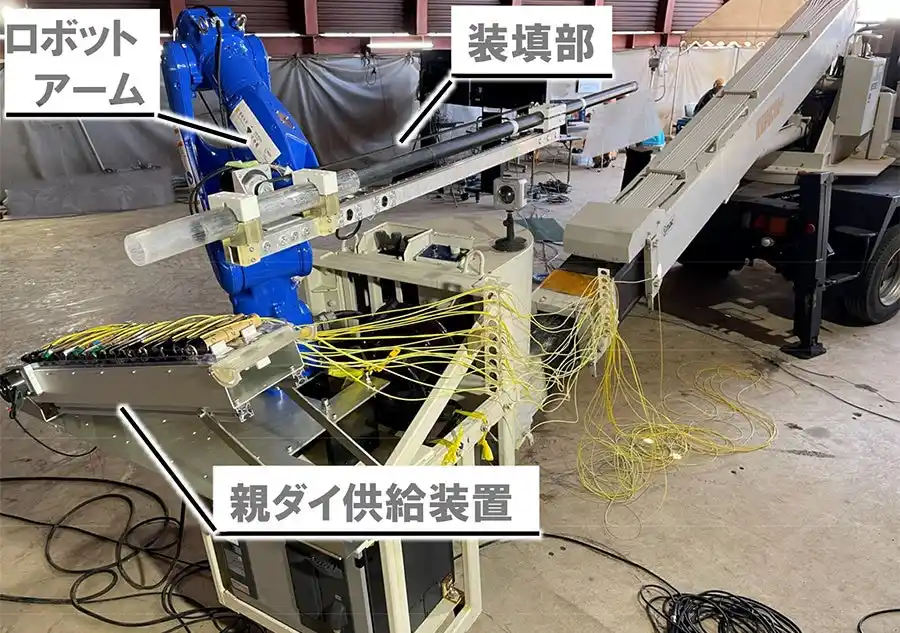
| (1)親ダイ供給装置 | |||||||||
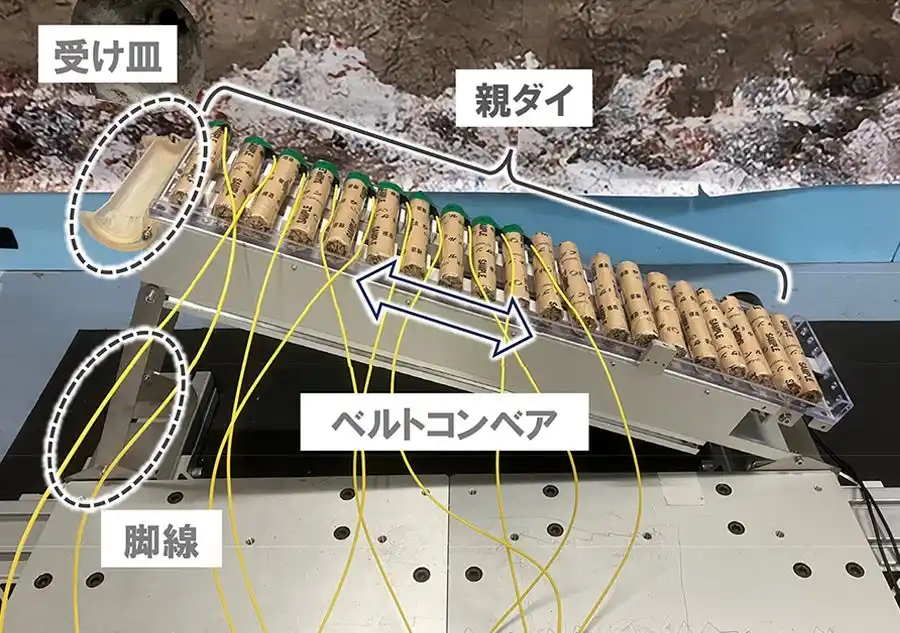
| 本システムに今回新たに搭載した親ダイ供給装置は、あらかじめセットした複数本の親ダイを、ベルトコンベアで搬送し受け皿へ順次供給する仕組みです。 | |||||||||
| (2)本システムによる装填方法 | |||||||||
| 親ダイ供給装置の受け皿に供給された親ダイを装填ロボットに取り込む際、リアルハプティクスによって負荷数値や感触などの情報がオペレータ室の作業者に伝わります。これにより、作業者は過剰な負荷がかかっていないかを確認しながら安全に親ダイを取り込むことが可能になります。その後、遠隔操作や孔検知技術と合わせた自律化により親ダイ、増ダイを装填します。 | |||||||||
| 脚線補助の治具や装填順序の統一により、脚線の絡まり、引張りによる破断も解消し、連続的に円滑な装填作業が可能になります。 | |||||||||
|
|||||||||
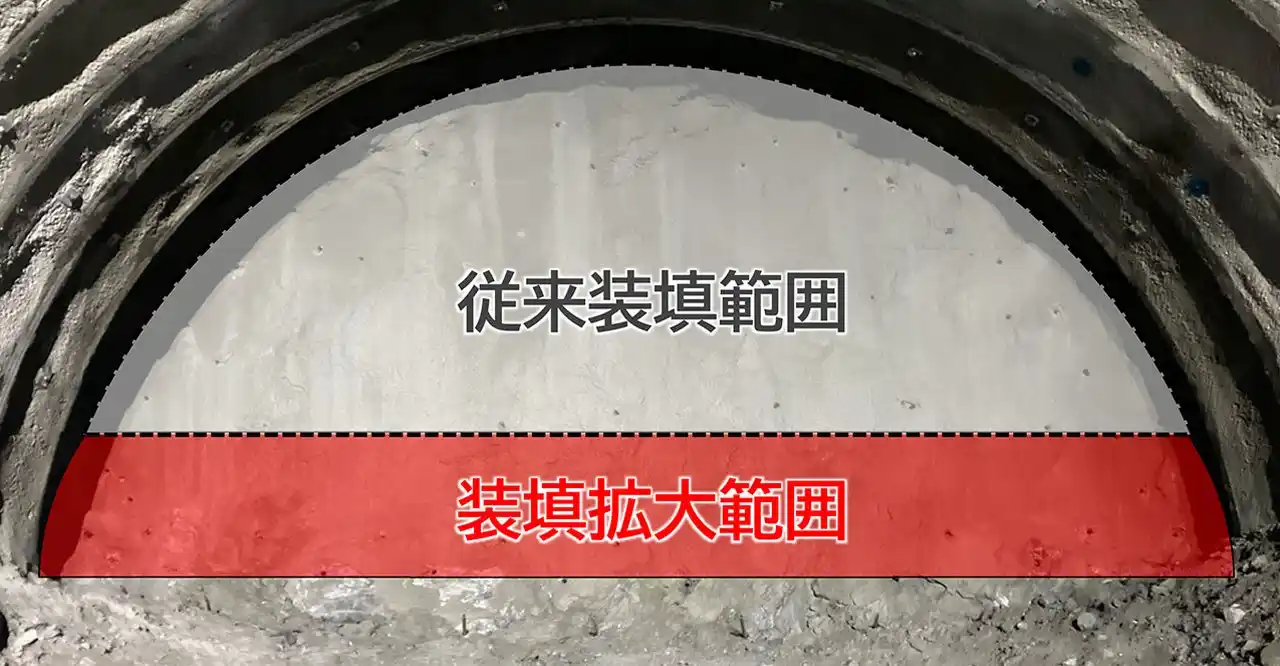
| (3)本システムの装填範囲拡大 | |||||||||
| 本システムと親ダイ供給装置の設置向きを調整可能にしたことで、装填できる範囲が拡大しました。これにより、これまで装填できなかった切羽の下方部分にも装填が可能になりました。 | |||||||||
|
|||||||||
| (4)現場実証での安全性向上および省人化の効果 | |||||||||
| 本システムは、国土交通省関東地方整備局発注 R4国道20号新笹子トンネルその1工事で試行適用しました。従来は切羽直下で5名が行っていた装填作業を、切羽から50m離れた場所から1名で実施できるようになり、安全性の向上と省人化を実現しました。 | |||||||||
| 3.今後の予定 | |||||||||
| 両者は今後、複数台での装填、大型重機の自動運転と本システムの連携、脚線結線(※8)作業の自動化を進め、一連の技術の現場適用を目指します。 | |||||||||
| リアルハプティクスは位置や力などの動作情報を記録、再現できる技術です。この技術を応用し、トンネル掘削作業の無人化を実現し、安全で効率的な働き方を目指した技術開発を進めます。 | |||||||||
|
※1 リアルハプティクス 現実の物体や周辺環境との接触情報を双方向で伝送し、力触覚を再現する技術。人間が物体に触った際に感じる硬さや柔らかさ、風船のような弾力、自律的な動きなどの力触覚を伝送することで、遠隔にいる操作者の手元で同様の力触覚が再現できる。慶應義塾大学では、力触覚技術が示す学術的な成果を応用し、広く医療・産業界に普及させることを目的として2014年にハプティクス研究センター(センター長:慶應義塾大学新川崎先端研究教育連携スクエア 大西公平特任教授)を設置し、研究開発を進めている |
|||||||||
|
※2 親ダイ 爆薬に雷管を取り付けた薬包(本試験ではφ25mm×100gの紙巻含水爆薬と導火管付き雷管を使用) |
|||||||||
|
※3 切羽直下 切羽の上面部分(天端)から45度の範囲内を指す |
|||||||||
|
※4 官民による若手研究者発掘支援事業(若サポ)(NEDOウェブサイト) 本研究開発は、若サポ・共同研究フェーズとして2021年度から進めている |
|||||||||
|
※5 雷管 わずかな熱や衝撃でも発火する火薬を筒に込めた火工品で、トンネル掘削では電気雷管や導火管付き雷管が使われる |
|||||||||
| ※6 山岳トンネル掘削作業における自動火薬装填システムの開発(2023.09.12付) | |||||||||
| ※7 「自動火薬装填システム」でトンネル切羽発破に成功(2024.12.02付) | |||||||||
|
※8 脚線結線 電気雷管や導火管付き雷管などの雷管を起爆させるための脚線を結ぶ作業 |
|||||||||