| - LTE圏外環境におけるワンオペ運搬を検証 写真測量(フォトグラメトリ)技術で生成した3D空間上で自動航行ルートを設計 - |
| 株式会社ロジクトロン(東京都練馬区)は、近畿大学(大阪府東大阪市)および株式会社近大アシスト(大阪府大阪狭山市)が主催し、株式会社ミヤマエ(大阪府東大阪市)とともに協力企業として参画した医療資材輸送ドローンの実証実験について、以下の通り報告いたします。実証は2025年10月21日(火)に近畿大学 東大阪キャンパスにて実施されました。 | |||
|
|||
| 実証実験の目的 | |||
| 本実証は、医療資材の自動輸送の社会実装に向けた検証を主目的とし、加えて以下の技術的課題の検証もあわせて実施しました。 | |||
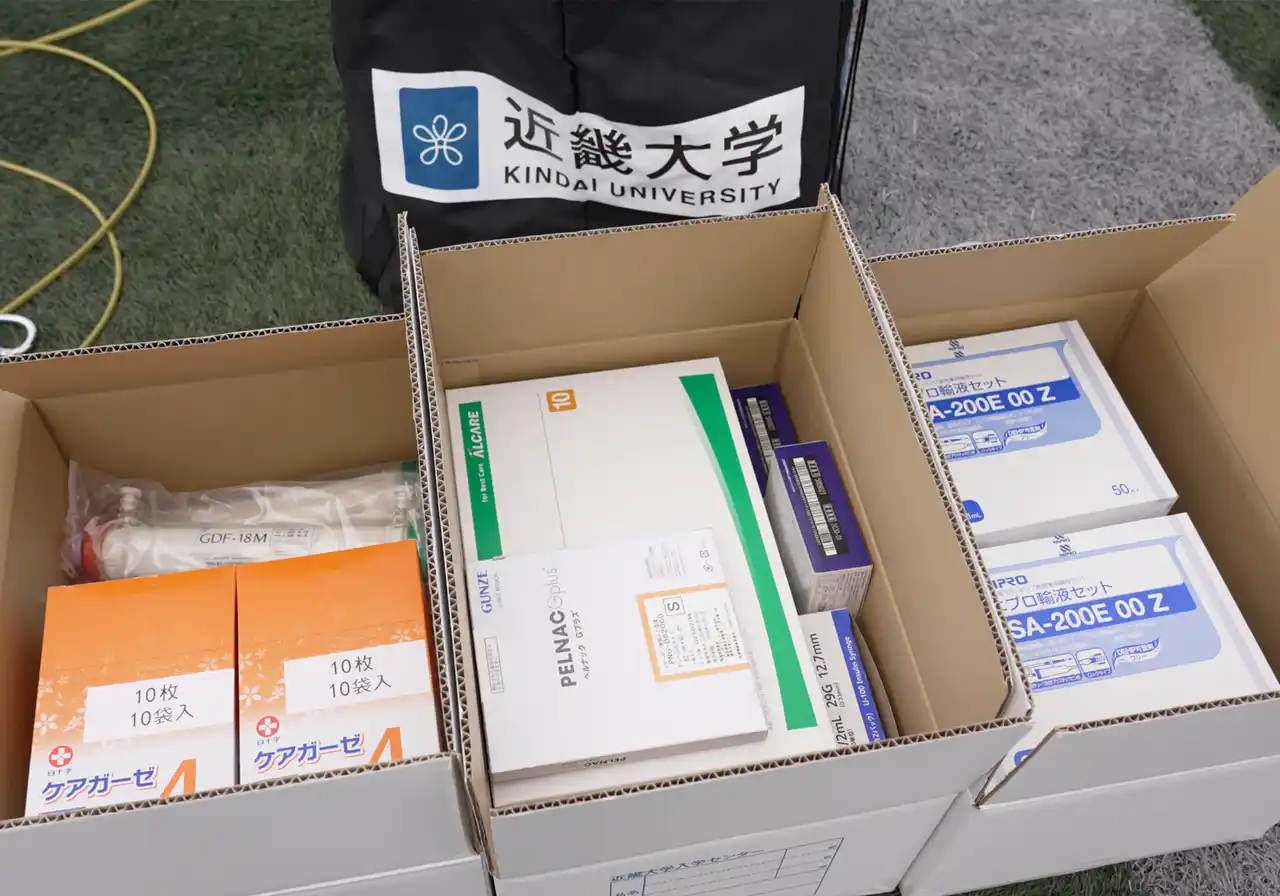
| 1. 医療資材の自動運搬に関する検証(本実証の主目的) | |||
|
|||
| 倉庫から病院などの医療機関へ医療資材を無人で輸送する将来的な運用モデルの構築。 | |||
| 医療資材(ガーゼ、輸血セット等)13.6kg(ワイヤー等の吊り具を除く)を実際に輸送し、離陸~荷下ろしまでの一連の流れを検証。 | |||
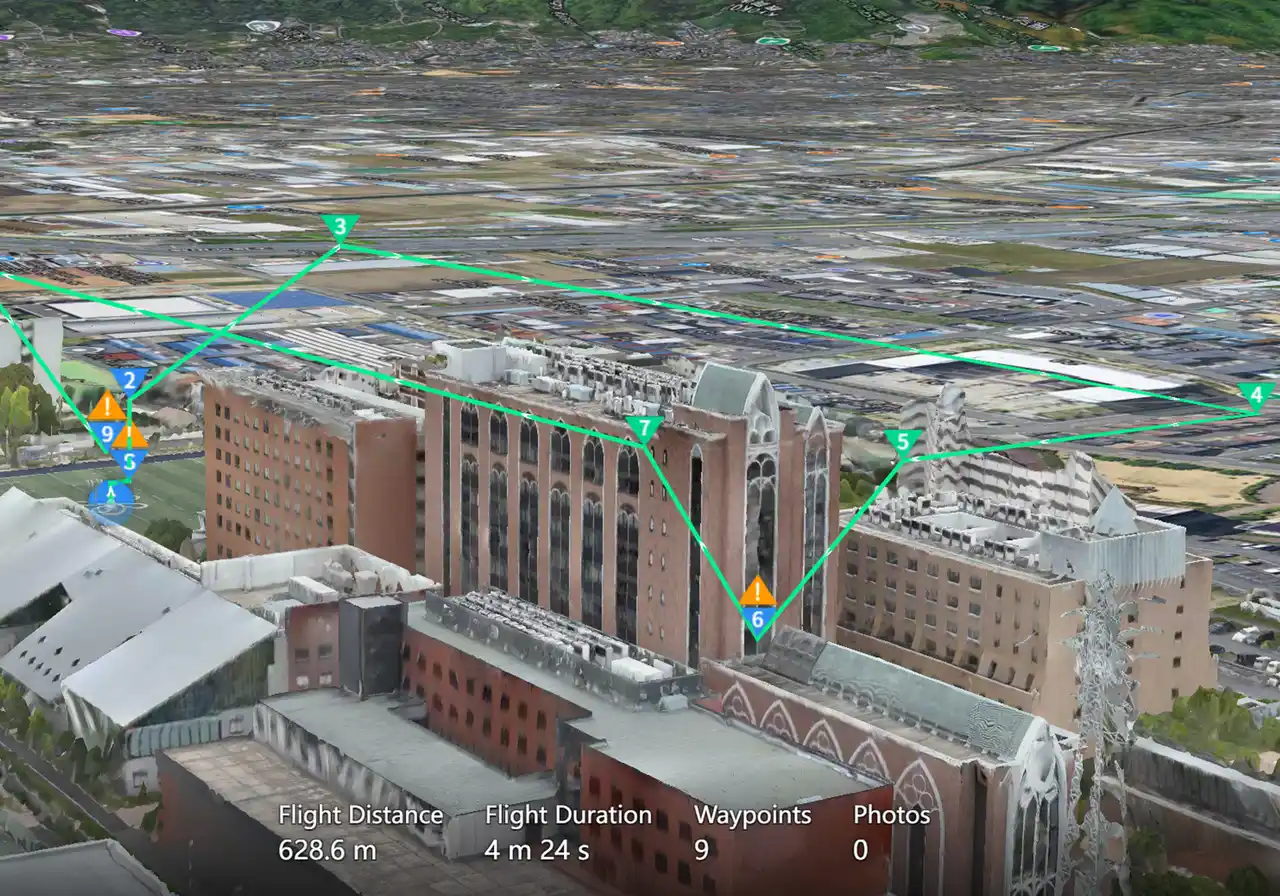
| 2. フォトグラメトリによる3D空間を用いた自動航行ルート設計(技術検証) | |||
|
|||
| 写真測量(フォトグラメトリ)技術で生成した高精度3D空間をもとに航路を作成。 | |||
| 既存建築物・高圧線などの障害物を避けながら安全なルートを設計できるかを検証。 | |||
| 建物の高さ情報をもとに、屋上上空でのホバリングおよび荷下ろしを精度高く行えるかを確認。 | |||
| 3. LTE通信が届かない環境下でのドローン運用可否に関する検証(技術目的) | |||
|
|||
| 災害時を想定し、LTE通信が不安定または圏外の状況で遠隔操作がどこまで可能かを検証。 | |||
| 通常は離陸地点と荷下ろし地点の双方にオペレーターが必要だが、ワンオペ(単独オペレーター)で荷下ろしまで完了可能であることを確認。 | |||
| これらの複合的な目的のもと、医療資材輸送に適した自動化技術と、災害時の通信途絶を前提とした実運用モデルの両面から検証を行いました。 | |||
| 実施概要 | |||
|
日時:2025年10月21日(火) 場所:近畿大学 東大阪キャンパス(大阪府東大阪市) 主催:近畿大学、株式会社近大アシスト(大阪府大阪狭山市) 協力:株式会社ミヤマエ(大阪府東大阪市)、株式会社ロジクトロン(東京都練馬区) 使用機体:DJI FlyCart 30 |
|||
| 実施内容と結果 | |||
| 本実験では、写真測量(フォトグラメトリ)技術で生成した3Dマップを基に自動航行ルートを設計し、離陸から荷下ろしまでの一連の輸送を検証しました。通常、離陸地点と荷下ろし地点それぞれにオペレーターを配置する必要がありますが、今回の実験により、LTEが届かない環境においても、ワンオペレーションで荷下ろしを完了できることを実証しました。これにより、災害時など現地オペレーターの派遣が困難な状況下でも、物資を確実に届ける運用モデルの可能性が確認されました。 | |||
| 本実験の様子をまとめた動画レポートを公開しています。 | |||
| [動画レポートはこちら] | |||
| 使用機体スペック | |||
|
機体名称:DJI FlyCart 30 最大積載重量:30kg(デュアルバッテリー運用時) 最大飛行距離:16km 最高速度:20m/s(約72km/h) 最大飛行時間:最大18分(標準モード時) 通信方式:O3映像伝送/LTEバックアップ対応 機能:ウインチ荷下ろし機構/冗長通信切替機構/障害物検知センサー/フェールセーフ自動帰還/防塵防水(IP55) |
|||
| 今後の展望 | |||
| 本実証の結果を踏まえ、今後はDID(人口集中地区)外での長距離飛行実証を段階的に実施し、倉庫から病院まで約8kmの自動輸送の実現を目指します。さらに、2025年10月29日に制度化されたレベル3.5飛行(補助者なしでの夜間・目視外・人口集中地区上空の運航が可能となる制度)の活用も視野に入れ、災害時や医療物資の緊急輸送など、社会インフラとしての大型ドローン活用を推進していきます。今後も地方自治体・医療機関との連携を強化し、地域防災計画へのドローン物流導入の可能性を検討していきます。 | |||
| お問い合わせ先 | |||
| 株式会社ロジクトロン ドローン事業部(担当:野間) | |||
| 電話:03-6876-7795 | |||
| メール:drone@logictron.jp | |||